장치 정의
장치의 정의를 변경하려면 Overview 보기에서 디바이스 정의를 선택하십시오.
프로젝트에 모듈을 처음으로 추가하는 경우, Device Definition 대화상자에는 기본적으로 Disabled로 설정된 Channel 0이 있는 Overview 보기만 표시됩니다. Channel 0 파라미터에 대해 선택한 내용에 따라 추가 파라미터가 있을 수 있습니다.
Channel 0을 Modbus Master로 설정하면 hannel 0 – Modbus Master 보기를 볼 수 있습니다. 자세한 내용은 Channel 0 – Modbus Master 보기을 참조하십시오.
Overview 보기의 Channel 0을 Modbus Slave로 설정하는 경우, 채널 0 – Modbus Slave 보기를 볼 수 있습니다. 자세한 내용은 Channel 0 – Modbus Slave 보기을 참조하십시오.
Overview 보기
Device Definition 대화상자의 Overview 보기를 사용해서 장치를 정의하거나 장치 정의를 변경하십시오.
Device Definition 대화상자 – Overview 보기
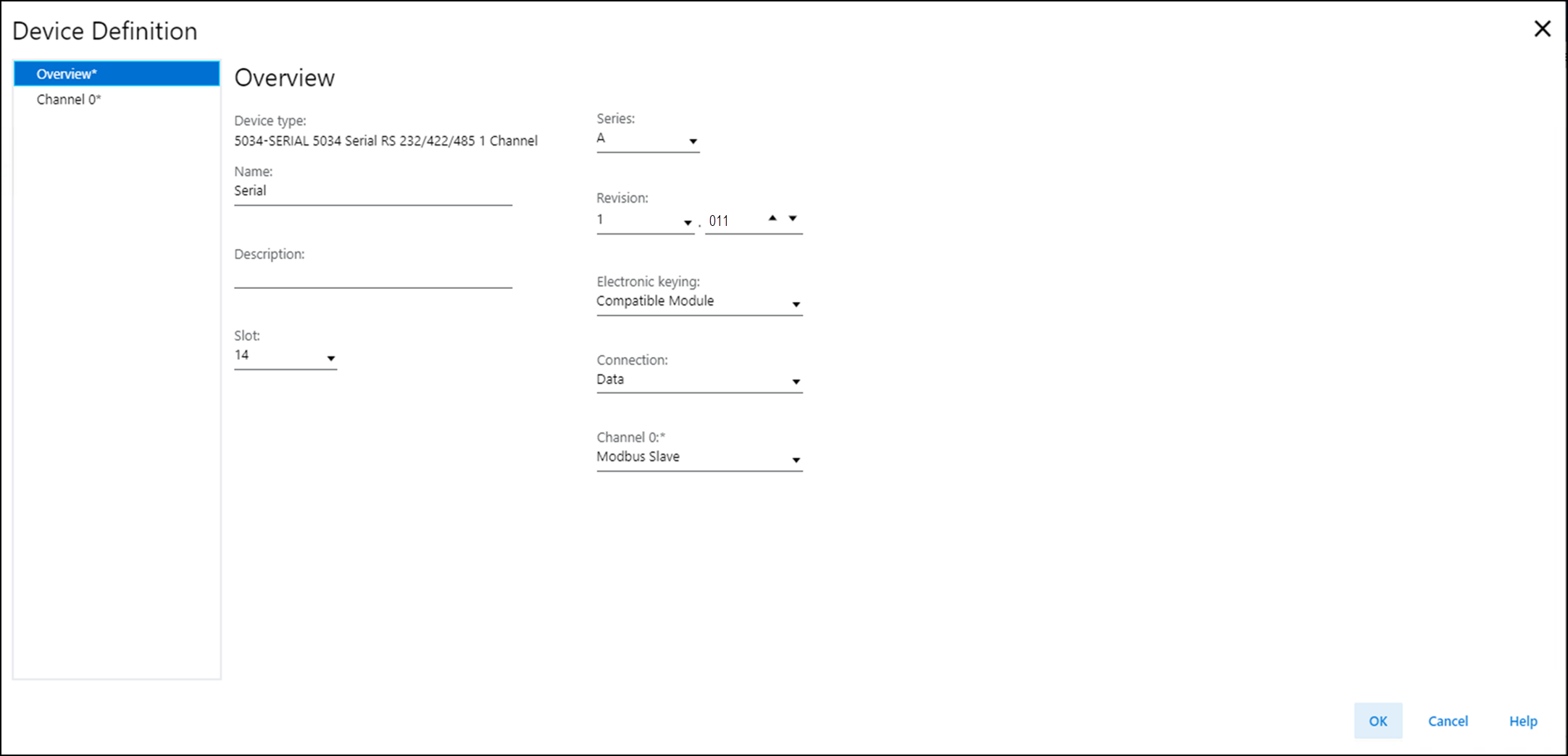
Overview 보기에는 다음과 같은 파라미터가 포함됩니다.
파라미터 | 정의 | 사용 가능한 선택 사항 |
|---|---|---|
Device Type | 장치 카탈로그 넘버와 유형을 표시합니다. | 장비별로 다름 |
Name | IEC 61131 호환 장치 이름을 입력하십시오. 이 필드에 잘못된 문자가 입력되거나 이름이 40자를 초과하는 경우 소프트웨어는 해당 문자를 무시합니다. | 모든 유효한 값 |
Description | 장치의 설명을 입력하십시오. | 모든 유효한 값 |
Slot | 장치가 있는 슬롯 번호를 지정하십시오. 플랫폼에 따라 1과 최대 I/O 장비 수 사이의 슬롯만 유효합니다. 장치가 생성되면 슬롯 번호는 기본적으로 첫 번째 사용 가능한 슬롯 위치로 설정됩니다. 컨트롤러가 더 작은 최대 I/O 카운트를 지원하는 값으로 변경되면 현재 슬롯 값이 더 이상 유효하지 않을 수 있습니다. | 1~32 |
Series | 장치의 시리즈를 지정합니다. | 장비별로 다름 |
Revision | 장치의 메이저 및 마이너 개정을 지정합니다. 마이너 개정의 유효 범위는 1~255입니다. | 장비별로 다름 |
Electronic Keying | 장치에 사용되는 Electronic Keying을 정의합니다. Electronic Keying은 프로젝트에 정의되어 있는 장치를 설치된 장치와 비교합니다. Keying이 실패한 경우 폴트가 발생합니다. Electronic Keying에 대한 정보는 Logix 5000 제어 시스템 애플리케이션의 Electronic Keying 기술서(Publication LOGIX-AT001)를 참조하십시오. |
주목 :
Disable Keying을 사용할 때는 특별히 주의하십시오. 잘못 사용하는 경우에는 상해 또는 사망, 재산 피해 또는 경제적 손실이 발생할 수 있습니다. Disable Keying은 사용하지 않는 것이 좋습니다. Disable Keying을 사용하는 경우, 사용자는 사용 중인 장치가 애플리케이션의 기능적 요건을 충족하는지 이해해야 할 전적인 책임을 집니다. |
Connection | 장치와 컨트롤러 간에 전송되는 데이터 유형을 지정합니다. | Data(기본값) |
Channel 0 | 채널에서 시리얼 장치로 데이터를 전송하고, 시리얼 장치로부터 데이터를 수신하는 데 사용되는 프로토콜을 지정합니다. |
자세한 내용은 표 2을 참조하십시오. |
통신 모드 | 정의 |
|---|---|
Disabled | 채널이 사용되지 않고 컨트롤러와 시리얼 모듈 간의 물리적 연결이 활성화되지 않았습니다. |
Generic ASCII | 통신에서 전송 또는 수신할 사용자 데이터를 정의할 수 있는 일반 시리얼 통신 모드입니다. |
Modbus Master | 장치가 Modbus 쿼리를 전송하거나 연결된 슬레이브 장치에 명령을 내립니다. |
Modbus Slave | 장치가 외부 마스터에 대한 슬레이브로 작동하고 마스터의 명령을 기다립니다. |
Channel 0 – Modbus Master 보기
Modbus Master 보기를 사용하면 Modbus Master 장치를 정의할 수 있습니다.
Channel 0 – Modbus Master 보기 예
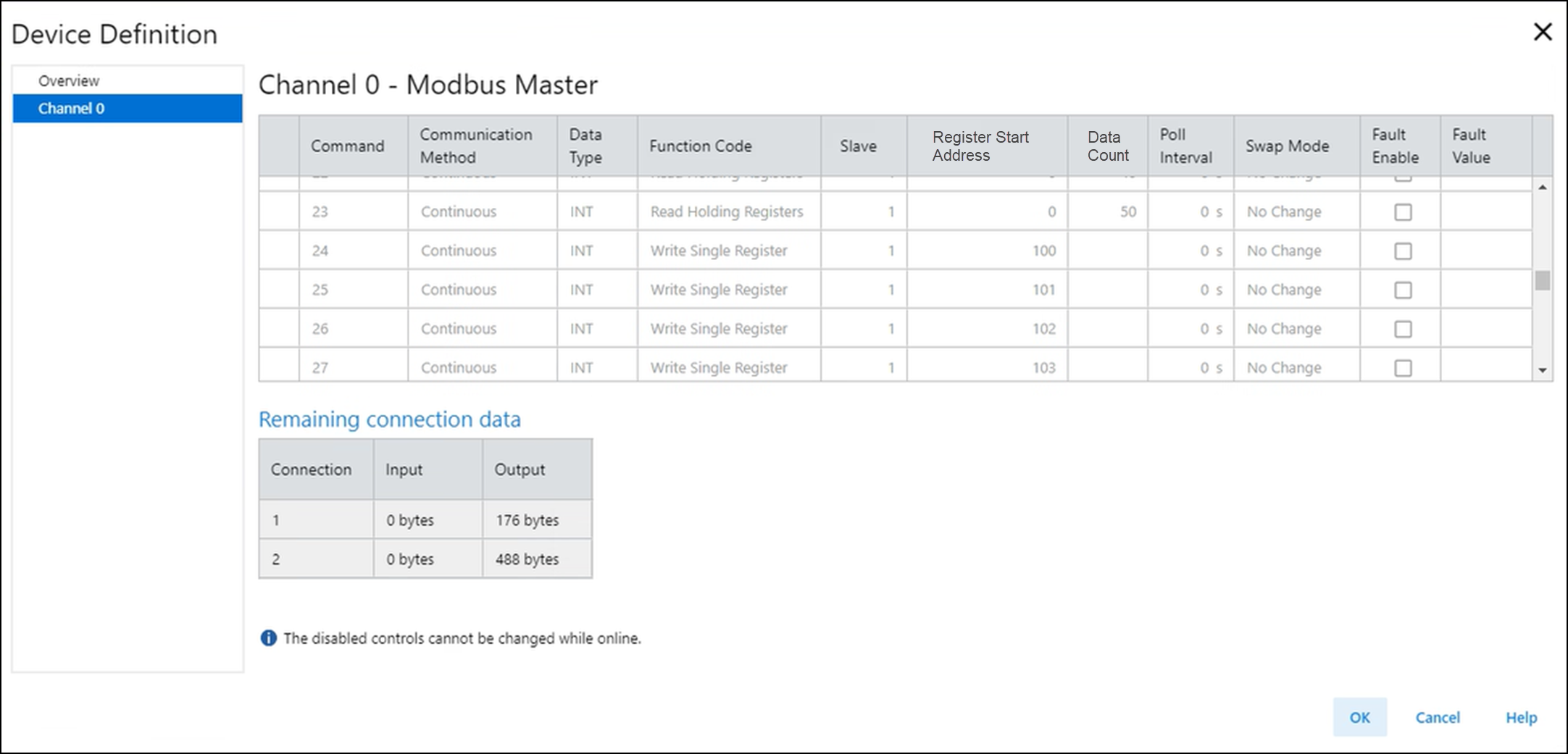
Modbus Master 보기에는 다음과 같은 파라미터가 포함됩니다.
파라미터 | 정의 | 사용 가능한 선택 사항 | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Command | 설정 중인 명령의 인덱스를 표시합니다. | 0~49 | ||||||||||||||||||
Communication Method | 명령의 통신 방법을 지정합니다.
팁:
통신 방법이 비활성화되면 파라미터를 사용할 수 없습니다.
|
| ||||||||||||||||||
Data Type | 명령의 데이터 유형을 지정합니다. |
| ||||||||||||||||||
Function Code | 명령의 기능을 지정합니다. 각 기능 코드 선택에 대한 설명은 표 4을 참조하십시오. | 명령의 기능을 지정합니다. 유효한 값은 Data Type에 따라 다릅니다. Data Type이 BOOL인 경우:
Data Type이 INT인 경우:
Data Type이 REAL인 경우:
| ||||||||||||||||||
Slave | Modbus Slave 장치의 노드 주소를 지정합니다. | 특정 Modbus Slave 장치의 유효한 주소는 1~247입니다. 브로드캐스트 명령의 경우 슬레이브를 0으로 설정합니다. 브로드캐스트 명령은 쓰기 명령만 가능합니다. | ||||||||||||||||||
Register Start Address | 읽거나 쓰는 레지스터의 시작 주소를 지정합니다. | 0~65,535 | ||||||||||||||||||
Data Count | 읽거나 쓰는 데이터 유형의 데이터 수를 지정합니다. REAL이 사용되는 경우, 각 데이터는 2개의 레지스터를 사용합니다. 읽거나 쓰는 연속 레지스터의 수는 다음과 같습니다.
Data Count로 인해 발생하는 종료 주소는 최대 주소인 65,535를 초과할 수 없습니다. 끝 주소는 (등록 시작 주소 + 레지스터 수 - 1)로 계산됩니다. | 유효한 데이터 길이 값은 Data Type 및 Function Code에 따라 달라집니다.
| ||||||||||||||||||
Poll Interval | Continuous 모드에서 명령이 실행되는 시간 사이의 초 수를 지정합니다. 예를 들어, Poll Interval이 10으로 설정되어 있는 경우, Modbus Master는 명령을 다시 실행하기 전에 10초간 기다립니다. Poll Interval이 0으로 설정되면 Modbus Master가 가능한 빨리 명령을 반복해서 전송합니다.
팁:
이 파라미터는 통신 방법이 Conditional인 경우에 사용할 수 없습니다.
| 0~32,767 | ||||||||||||||||||
Swap Mode | Modbus Slave에서 수신되거나 전송되는 4바이트의 데이터의 배열을 지정합니다. |
팁:
A, B, C, D는 수신/전송 데이터에 인접한 4개의 바이트를 나타냅니다.
| ||||||||||||||||||
Fault Enable | 읽기 명령이 실패할 경우 수신된 데이터를 폴트 값으로 덮어쓸지 여부를 결정합니다. 수신된 데이터를 폴트 값으로 덮어쓰려면 확인란을 선택하십시오.
팁:
이 파라미터는 Function Code가 쓰기 명령일 때 사용할 수 없습니다.
| – | ||||||||||||||||||
Fault Value | 읽기 명령이 실패할 경우 수신된 데이터를 대체할 값을 지정합니다. | – | ||||||||||||||||||
Connection 1/Connection 2 | 명령 통신은 기본적으로 Connection 1을 사용합니다. 명령 데이터 크기가 Connection 1에 사용 가능한 나머지 데이터 양을 초과하는 경우, 이 명령은 대신 Connection 2를 사용합니다. | – | ||||||||||||||||||
Input | 해당 연결에 대해 남아 있는 읽기 데이터의 양을 보여줍니다. | – | ||||||||||||||||||
Output | 해당 연결에 대해 남아 있는 쓰기 데이터의 양을 보여줍니다. | – |
데이터 유형 | 펑션 코드 | 설명 |
|---|---|---|
BOOL | Read Coils (기능 코드 01) | 슬레이브 장치에서 코일의 연속 상태 1~2000을 읽습니다. |
Read Discrete Inputs (기능 코드 02) | 슬레이브 장치에서 이산 입력의 1~2000 연속 상태를 읽습니다. | |
Write Single Coil (기능 코드 05) | 슬레이브 장비의 ON 또는 OFF에 단일 출력을 씁니다. | |
Write Multiple Coils (기능 코드 15) | 슬레이브 장치에서 ON 또는 OFF에 1~1968 연속 출력을 씁니다. | |
INT | Read Holding Registers (기능 코드 03) | 슬레이브 장치에서 INT Holding Register의 1~125 연속 블록을 읽습니다. |
Read Input Registers (기능 코드 04) | 슬레이브 장치에서 INT Input Register의 1~125 연속 블록을 읽습니다. | |
Write Single Register (기능 코드 06) | 슬레이브 장치에 단일 Holding Register를 씁니다. | |
Write Multiple Registers (기능 코드 16) | 슬레이브 장치에 INT Holding Registers의 연속 블록 1~123을 씁니다. | |
REAL | Read Holding Registers (기능 코드 03) | 슬레이브 장치에서 REAL Holding Registers의 연속 블록 1~62를 읽습니다. |
Read Input Registers (기능 코드 04) | 슬레이브 장치에서 REAL Input Registers의 연속 블록 1~62를 읽습니다. | |
Write Multiple Registers (기능 코드 16) | 슬레이브 장치에 REAL Holding Registers의 연속 블록 1~61을 씁니다. |
마스터 명령 목록 제한
마스터 명령 목록의 제한 사항은 다음과 같습니다.
- 최대 50개의 명령을 작성할 수 있습니다. 명령은 사용 가능한 연결 메모리에 따라 달라집니다.
- 각 Modbus Master는 최대 2개의 데이터 연결을 지원합니다.
- 연결 1은 최대 464바이트의 읽기 데이터와 476바이트의 쓰기 데이터를 지원합니다.
- 연결 2는 최대 472바이트의 읽기 데이터와 488바이트의 쓰기 데이터를 지원합니다.
- 각 명령은 다음을 사용합니다.
- 홀딩 레지스터 또는 입력 레지스터 읽기당 2 바이트의 입력 데이터.
- 1~8개의 코일 또는 개별 입력 읽기 당 1 바이트의 입력 데이터.
- 기록된 보유 레지스터 당 2 바이트의 출력 데이터.
- 기록된 1~8개의 코일 당 1 바이트의 출력 데이터.
- 연결 메모리가 초과되면 오류 메시지가 나타납니다.
마스터 명령 메모리 사용량
다음은 마스터 명령 메모리 사용량의 예입니다.
- 레지스터에 대한 최대 단일 연결 구성:
- 223 워드 * 2 바이트/워드 읽기 = 446 입력 바이트
- 241 워드 * 2 바이트/워드 쓰기 = 482 출력 바이트

- 코일에 대한 최대 단일 연결 구성:
- 3576 비트/8 비트/바이트 읽기 = 447 입력 바이트
- 3856 비트/8 비트/바이트 쓰기 = 482 출력 바이트

Channel 0 – Modbus Slave 보기
Modbus Slave 보기를 사용하면 Modbus Slave 장치를 정의할 수 있습니다.
Channel 0 – Modbus Slave 보기 예
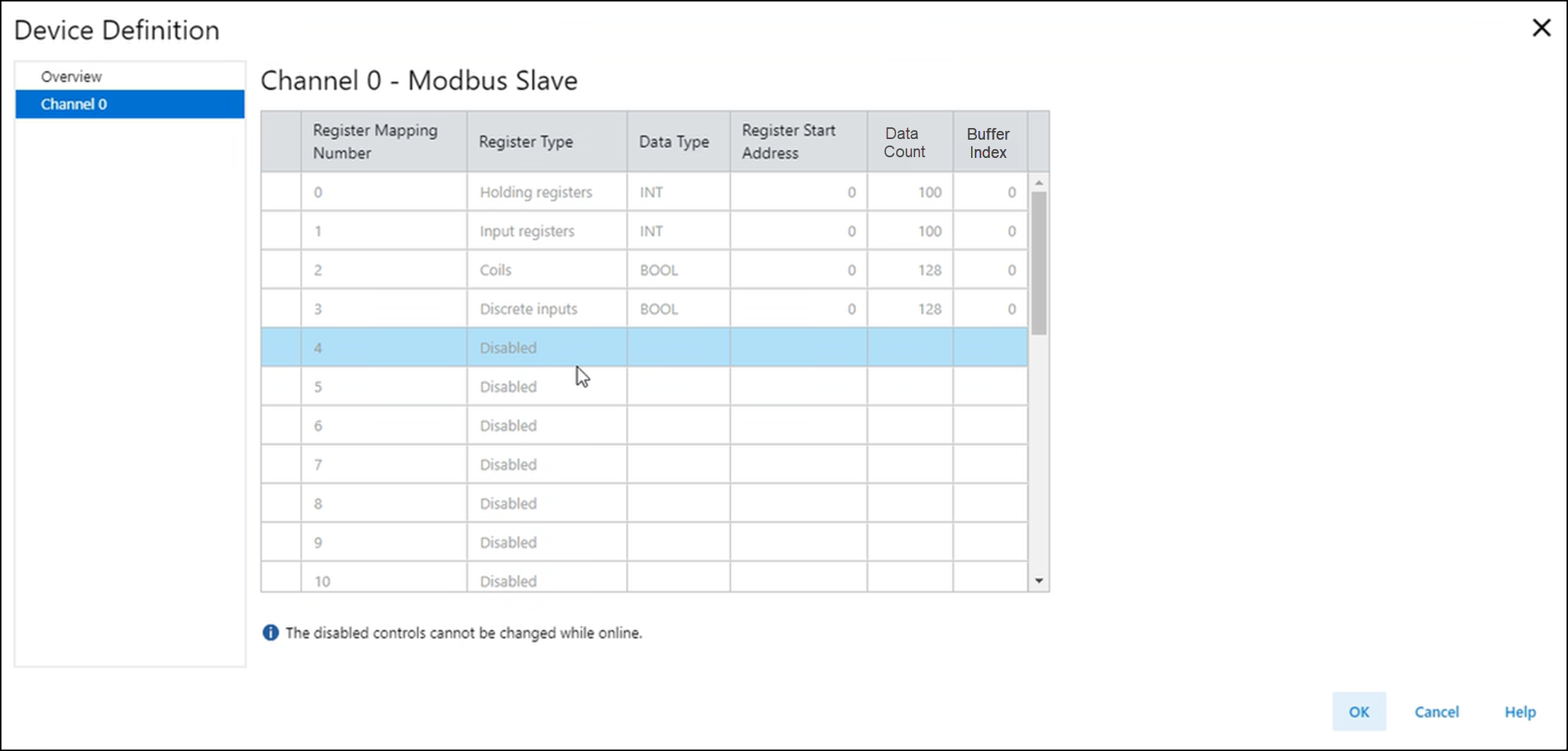
Modbus Slave 보기에는 다음 파라미터가 포함됩니다.
파라미터 | 정의 | 사용 가능한 선택 사항 |
|---|---|---|
Register Mapping Number | 레지스터 매핑 넘버를 표시합니다. | 0~29 |
Register Type | 레지스터 유형을 지정합니다.
팁:
레지스터 유형이 비활성화되면 파라미터를 사용할 수 없습니다.
|
|
Data Type | 레지스터의 데이터 유형을 지정합니다. | 사용 가능한 옵션은 선택한 레지스터 유형에 따라 달라집니다. Coils 및 Discrete Inputs의 경우 사용 가능한 옵션은 다음과 같습니다.
Holding Registers 및 Input Registers의 경우 사용 가능한 옵션은 다음과 같습니다.
|
Register Start Address | 레지스터의 시작 주소를 지정합니다. | 0~65,535 |
Data Count | Data Type의 데이터 수를 지정합니다. | 유효한 값은 Data Type에 따라 달라집니다.
읽거나 쓰는 연속 레지스터의 수는 다음과 같습니다.
레지스터 유형이 동일한 두 매핑의 경우 레지스터 범위가 겹치지 않아야 합니다. 각 매핑의 레지스터 범위는 Register Start Address에서 매핑의 끝 주소까지입니다. 끝 주소는 (등록 시작 주소 + 레지스터 수 - 1)로 계산됩니다. 각 매핑의 끝 주소는 최대 주소인 65,535를 초과해서는 안 됩니다. |
Buffer Index | 입력 및/또는 출력 태그에 있는 레지스터 버퍼의 버퍼 인덱스를 지정합니다. 이 태그는 HoldingRegister[y], Coil[z], InputRegister[y] 및 DiscreteInput[z]이며, 여기에서 "y" 및 "z"는 Buffer Index입니다. |
이 레지스터 매핑이 차지하는 연속 버퍼의 수는 다음과 같습니다.
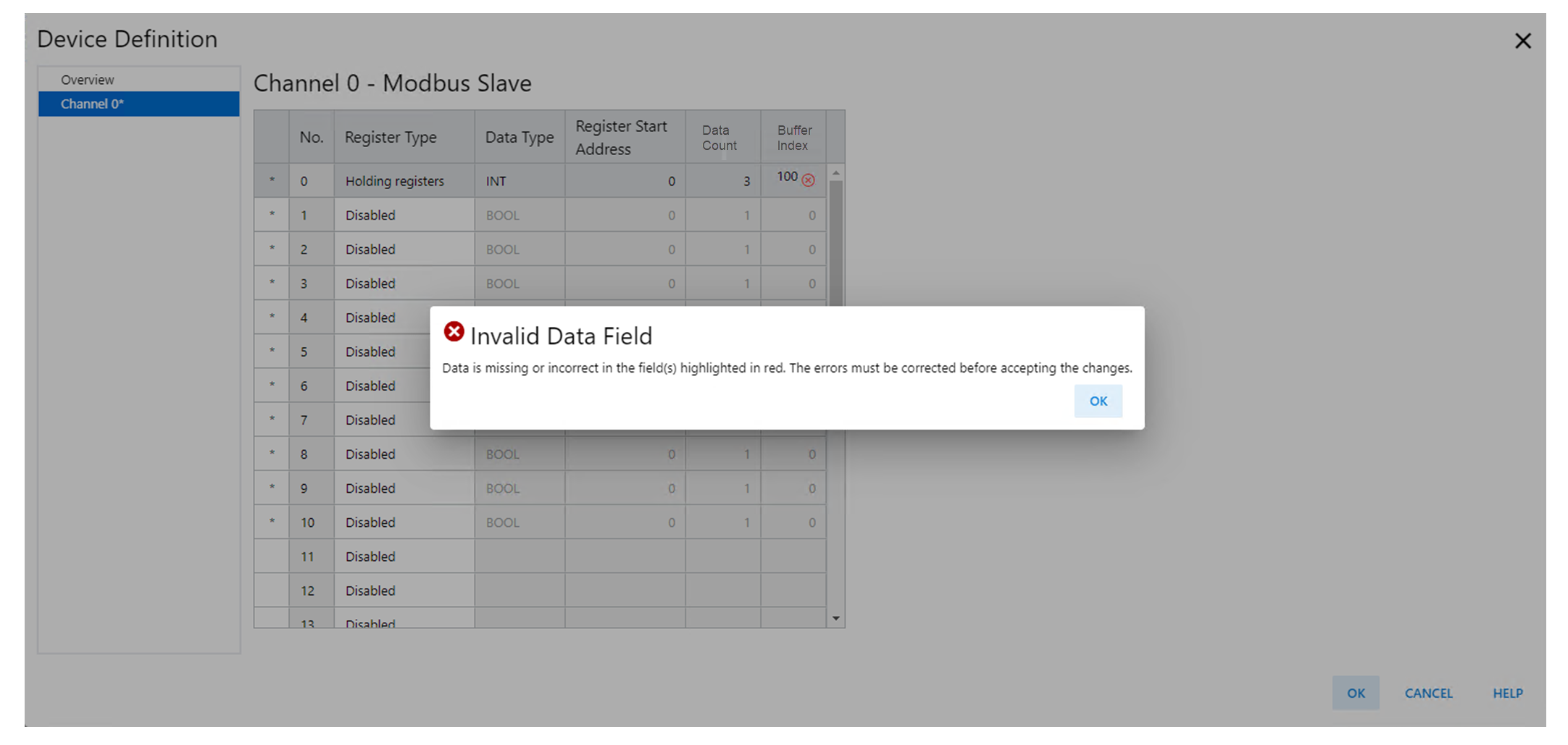
동일한 레지스터 유형을 갖는 2개의 레지스터 매핑의 경우 버퍼 범위가 겹치면 안 됩니다. 버퍼 범위는 Buffer Index부터 Data Count로 인한 최종 버퍼 인덱스까지입니다. 종료 버퍼 인덱스는 (버퍼 인덱스 + 버퍼 수 - 1)로 계산됩니다. 각 매핑의 종료 버퍼 인덱스는 위에 정의된 버퍼 인덱스의 유효 범위를 초과할 수 없습니다. |
Buffer Index 에러 예
Modbus Slave 주소 테이블 제한값
사용 가능한 메모리에 따라 Module Slave 주소 테이블에 최대 30개의 데이터 포인트 범위를 생성할 수 있습니다.
- 최대 200 바이트의 Holding Registers(최대 100개의 INT 또는 50개의 REAL)
- 최대 200 바이트의 Input Registers(최대 100개의 INT 또는 50개의 REAL)
- 최대 128개 코일(8 비트 경계에서 데이터 인덱스 0~15)
- 최대 128개의 개별 입력(8 비트 경계에서 데이터 인덱스 0~15)
Modbus Slave 데이터 맵핑 예
Modbus Slave 데이터 맵핑 예
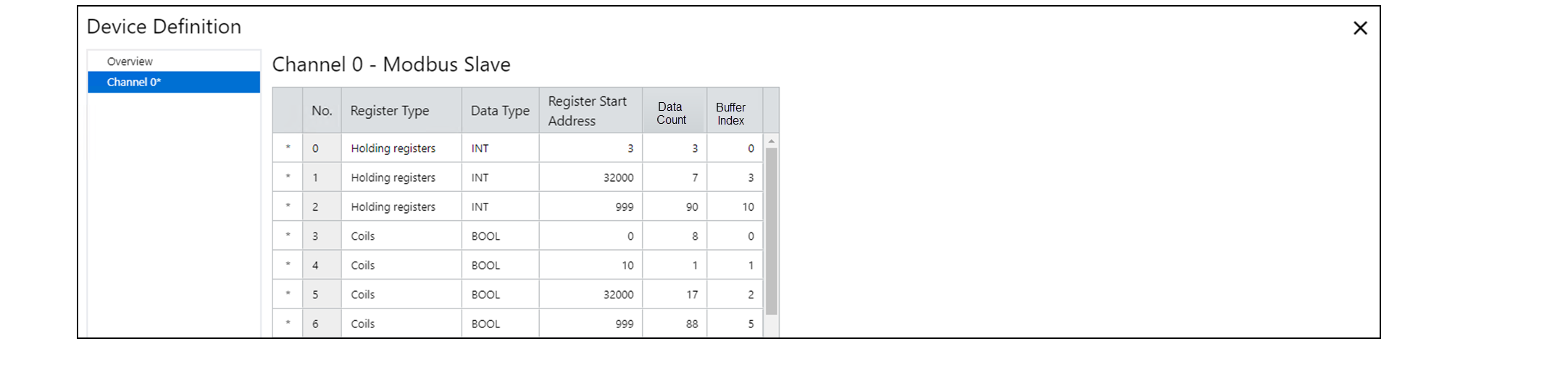
그림 5에 표시된 데이터는 모듈 태그에서 다음과 같이 해석할 수 있습니다:
- v:2:O1.Slave.HoldingRegister[0~2] = 400003~400005
- v:2:O1.Slave.HoldingRegister[3~9] = 432000~432006
- v:2:O1.Slave.HoldingRegister[10~99] = 400999~410088
- v:2:O1.Slave.Coil[0].0~0.7 = 000000~000007
- v:2:O1.Slave.Coil[1].0 = 000010
- v:2:O1.Slave.Coil[2].0~[4].0 = 0320000~032016
- v:2:O1.Slave.Coil[5].0~[15].7 = 000999~001086

의견을 작성 부탁드립니다.