Device Definition (Définition de dispositif)
Pour modifier la définition d’un dispositif, sélectionnez Device Definition (Définition de dispositif) dans la vue Overview (Vue d’ensemble).
Lorsque vous ajoutez le module au projet pour la première fois, la boîte de dialogue Device Definition (Définition de dispositif) affiche uniquement la vue Overview (Vue d’ensemble) avec l’option Channel 0 (Voie 0) réglée sur Disabled (Désactivée) par défaut. Selon votre choix pour le paramètre Channel 0 (Voie 0), vous pouvez avoir des paramètres supplémentaires.
Si vous réglez Channel 0 (Voie 0) sur Modbus Master (Modbus maître), vous pouvez afficher la vue Channel 0 – Modbus Master (Voie 0 – Modbus maître). Pour plus d'informations, voir Vue Channel 0 – Modbus Master (Voie 0 – Modbus maître).
Si vous réglez Channel 0 (Voie 0) dans la vue Overview (Vue d’ensemble) sur Modbus Slave (Modbus esclave), vous pouvez afficher la vue Channel 0 – Modbus Slave (Voie 0 – Modbus esclave). Pour plus d'informations, voir Vue Channel 0 – Modbus Slave (Voie 0 – Modbus esclave).
Vue Overview (Vue d’ensemble)
La vue Overview (Vue d’ensemble) de la boîte de dialogue Device Definition (Définition de dispositif) permet de définir un dispositif ou de modifier la définition d’un dispositif.
Boîte de dialogue Device Definition (Définition de dispositif) – Vue Overview (Vue d’ensemble)
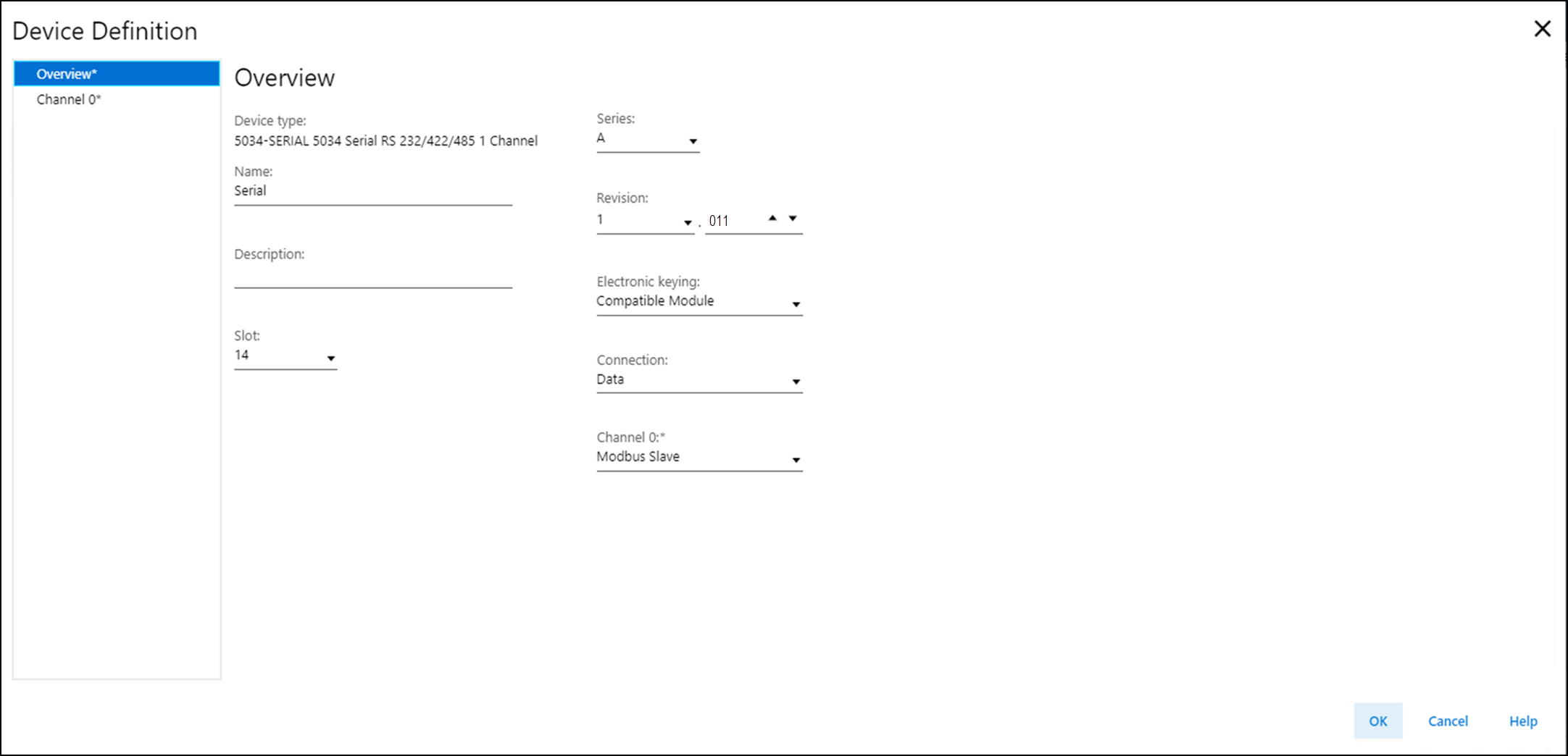
La vue Overview (Vue d’ensemble) comprend les paramètres suivants :
Paramètre | Définition | Choix disponibles |
|---|---|---|
Device Type (Type de dispositif) | Affiche la référence et le type du dispositif. | Spécifique au dispositif |
Name (Nom) | Entrez un nom de dispositif conforme à la norme IEC 61131. Si un caractère incorrect est saisi dans ce champ ou si le nom dépasse 40 caractères, le logiciel ignore le caractère. | Toutes les valeurs valables |
Description | Entrez la description du dispositif. | Toutes les valeurs valables |
Slot (Logement) | Spécifiez le numéro de logement du dispositif. Seuls les logements entre 1 et le nombre maximal de dispositifs d’E/S sont valables selon la plate-forme Lors de la création du dispositif, le numéro de logement est par défaut la première position de logement disponible. Lorsque l’automate est remplacé par un automate prenant en charge un nombre d’E/S maximum plus petit, la valeur de logement actuelle peut ne plus être valable. | 1 à 32 |
Series (Série) | Spécifie la série du dispositif. | Spécifique au dispositif |
Revision (Révision) | Définit les révisions majeures et mineures du dispositif. La plage valable pour la révision mineure est comprise entre 1 et 255. | Spécifique au dispositif |
Electronic Keying (Détrompage électronique) | Définit le détrompage électronique utilisé pour le dispositif. Le détrompage électronique compare le dispositif défini dans votre projet au dispositif installé. En cas d’échec du détrompage, un défaut se produit. Pour des informations détaillées sur le détrompage électronique, consultez la publication LOGIX-AT001, « Electronic Keying in Logix 5000 Control Systems Application Technique ». |
ATTENTION:
Soyez très vigilant si vous choisissez de désactiver le détrompage. Une utilisation inconsidérée de cette option peut aboutir à des blessures potentiellement mortelles, des dégâts matériels ou des pertes financières. Il est fortement recommandé de ne pas utiliser Disable Keying (Désactiver le détrompage). Si vous désactivez le détrompage, vous devez vous assurer que le dispositif utilisé est capable de répondre aux exigences fonctionnelles de l’application. |
Connection (Connexion) | Spécifiez le type de données transférées entre le dispositif et l’automate. | Data (Données) (valeur par défaut) |
Channel 0 (Voie 0) | Définit le protocole utilisé par la voie pour transmettre des données à un dispositif série et recevoir des données d’un dispositif série. |
Pour plus d'informations, voir Tableau 2. |
Mode de communication | Définition |
|---|---|
Désactivé | La voie est inutilisée et aucune connexion physique n’est activée entre l’automate et le module série. |
ASCII générique | Un mode général de communication série dans lequel vous pouvez définir toute donnée utilisateur à transmettre ou recevoir dans la communication. |
Modbus maître | Le dispositif envoie des questions ou des commandes d’écriture Modbus aux dispositifs esclaves qui lui sont connectés. |
Modbus esclave | Le dispositif fonctionne comme l’esclave d’un maître externe et attend des commandes provenant du maître. |
Vue Channel 0 – Modbus Master (Voie 0 – Modbus maître)
La vue Modbus Master (Modbus maître) vous permet de définir le dispositif Modbus maître.
Exemple de vue Channel 0 – Modbus Master (Voie 0 – Modbus maître)
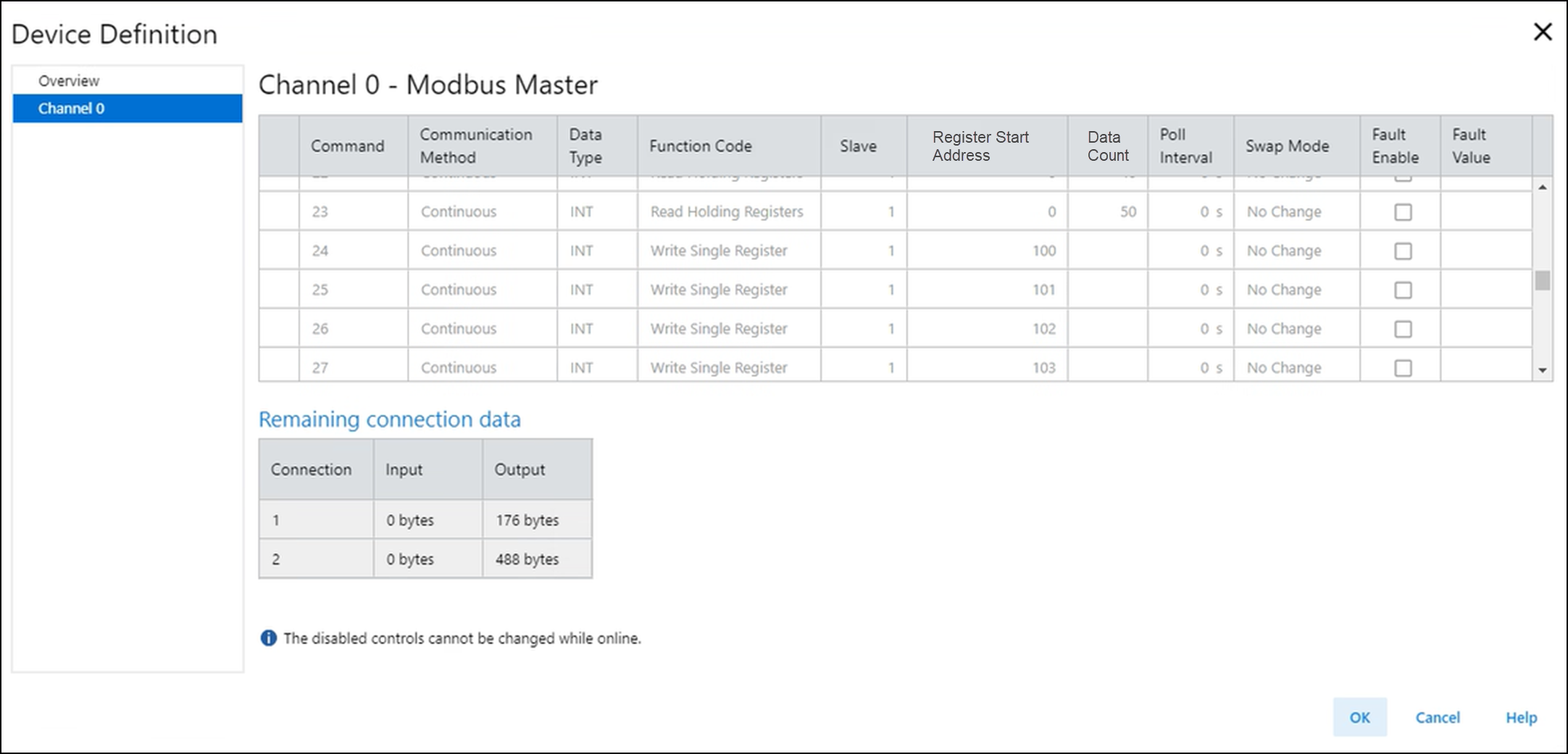
La vue Modbus Master (Modbus maître) comprend les paramètres suivants :
Paramètre | Définition | Choix disponibles | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Command (Commande) | Affiche l’index de la commande en cours de configuration. | 0 à 49 | ||||||||||||||||||
Communication Method (Méthode de communication) | Définit la méthode de communication pour la commande.
CONSEIL:
Les paramètres ne sont pas disponibles lorsque la méthode de communication est désactivée.
|
| ||||||||||||||||||
Data Type (Type de données) | Définit le type de données pour la commande. |
| ||||||||||||||||||
Function Code (Code de fonction) | Définit la fonction de la commande. Voir le Tableau 4 pour connaître la description de chaque choix de code de fonction. | Définit la fonction de la commande. Les valeurs valables dépendent de l’option Data Type (Type de données). Si Data Type (Type de données) est BOOL :
Si Data Type (Type de données) est INT :
Si Data Type (Type de données) est REAL :
| ||||||||||||||||||
Slave (Esclave) | Définit l’adresse de station du dispositif Modbus esclave. | Les adresses valables d’un dispositif Modbus esclave spécifique sont comprises entre 1 et 247. Pour la commande de diffusion, réglez l’esclave sur 0. La commande de diffusion ne peut être qu’une commande d’écriture. | ||||||||||||||||||
Register Start Address (Adresse de début de registre) | Définit l’adresse de début des registres en cours de lecture ou d’écriture. | 0 à 65 535 | ||||||||||||||||||
Data Count (Nombre de données) | Définit le nombre de données du type de données en cours de lecture ou d’écriture. Si REAL est utilisé, chaque donnée utilise 2 registres. Le nombre de registres consécutifs lus/écrits est le suivant :
L’adresse de fin causée par le nombre de données ne doit pas dépasser l’adresse maximale de 65 535. L’adresse de fin est calculée comme suit : (adresse de début du registre + nombre de registres - 1). | Les valeurs de longueur de données valables dépendent du type de données et du code de fonction.
| ||||||||||||||||||
Poll Interval (Intervalle d’appel) | Définit le nombre de secondes entre chaque exécution de la commande en mode continu. Par exemple, si l’option Poll Interval (Intervalle d’appel) est réglée sur 10, le Modbus maître attend 10 secondes avant d’exécuter à nouveau la commande. Lorsque l’option Poll Interval (Intervalle d’appel) est réglée sur 0, le Modbus maître répète la transmission de la commande aussi rapidement que possible.
CONSEIL:
Ce paramètre n’est pas disponible lorsque la méthode de communication est conditionnelle.
| 0 à 32 767 | ||||||||||||||||||
Swap Mode (Mode permutation) | Définit l’organisation de tous les groupes de 4 octets de données reçues en provenance du Modbus esclave ou transmises au Modbus esclave. |
CONSEIL:
A, B, C et D représentent quatre octets adjacents dans les données reçues/transmises.
| ||||||||||||||||||
Fault Enable (Activation défaut) | Détermine s’il faut écraser les données reçues par une valeur de défaut si la commande de lecture échoue. Cochez la case pour écraser les données reçues par la valeur de défaut.
CONSEIL:
Ce paramètre n’est pas disponible lorsque le code de fonction est une commande d’écriture.
| – | ||||||||||||||||||
Fault Value (Valeur de défaut) | Spécifie la valeur de remplacement des données reçues si la commande de lecture échoue. | – | ||||||||||||||||||
Connection 1 (Connexion 1)/Connection 2 (Connexion 2) | La communication de commande utilise la connexion 1 par défaut. Si une taille de données de commande dépasse la quantité de données disponibles restantes pour la connexion 1, la commande utilise la connexion 2 à la place. | – | ||||||||||||||||||
Input (Entrée) | Affiche la quantité de données de lecture restantes pour cette connexion. | – | ||||||||||||||||||
Output (Sortie) | Affiche la quantité de données d’écriture restantes pour cette connexion. | – |
Type de données | Code de fonction | Description |
|---|---|---|
BOOL | Read Coils (Lire des bobines) (code de fonction 01) | Lit 1 à 2 000 états contigus de bobines dans un dispositif esclave. |
Read Discrete Inputs (Lire des entrées TOR) (code de fonction 02) | Lit 1 à 2 000 états contigus d’entrées TOR dans un dispositif esclave. | |
Write Single Coil (Écrire une bobine unique) (code de fonction 05) | Écrit une sortie unique sur ON ou OFF dans un dispositif esclave. | |
Write Multiple Coils (Écrire plusieurs bobines) (code de fonction 15) | Écrit 1 à 1 968 sorties uniques sur ON ou OFF dans un dispositif esclave. | |
INT | Read Holding Registers (Lire des registres de stockage) (code
de fonction 03) | Lit 1 à 125 blocs contigus de registres de maintien INT dans un dispositif esclave. |
Read Input Registers (Lire des registres d’entrée) (code de
fonction 04) | Lit 1 à 125 blocs contigus de registres d’entrée INT dans un dispositif esclave. | |
Write Single Register (Écrire un registre unique) (code de fonction 06) | Écrit un registre de maintien unique dans un dispositif esclave. | |
Write Multiple Registers (Écrire plusieurs registres) (code de fonction 16) | Écrit 1 à 123 blocs contigus de registres de maintien INT dans un dispositif esclave. | |
REAL | Read Holding Registers (Lire des registres de stockage) (code
de fonction 03) | Lit 1 à 62 blocs contigus de registres de maintien REAL dans un dispositif esclave. |
Read Input Registers (Lire des registres d’entrée) (code de
fonction 04) | Lit 1 à 62 blocs contigus de registres d’entrée REAL dans un dispositif esclave. | |
Write Multiple Registers (Écrire plusieurs registres) (code de fonction 16) | Écrit 1 à 61 blocs contigus de registres de maintien REAL dans un dispositif esclave. |
Limitations de liste de commande maître
Les limitations de la liste de commande maître sont les suivantes :
- Un maximum de 50 commandes peut être créé. Les commandes sont soumises à la mémoire de connexion disponible.
- Chaque Modbus maître prend en charge jusqu'à deux connexions de données.
- La connexion 1 prend en charge un maximum de 464 octets de données de lecture et 476 octets de données d’écriture.
- La connexion 2 prend en charge un maximum de 472 octets de données de lecture et 488 octets de données d’écriture.
- Chaque commande utilise :
- 2 octets de données d’entrée par registre de maintien ou par registre d’entrée lu.
- 1 octet de données d’entrée pour chaque groupe de 1 à 8 bobines ou entrées TOR lu.
- 2 octets de donnée de sortie par registre de maintien écrit.
- 1 octet de données de sortie pour chaque groupe de 1 à 8 bobines écrit.
- Un message d’erreur quand la mémoire de connexion est dépassée.
Utilisation de la mémoire de commande maître
Vous trouverez ci-dessous des exemples d’utilisation mémoire de commande maître :
- Configuration de connexion unique maximale pour les registres :
- 223 mots x 2 octets/mot lus = 446 octets d’entrée
- 241 mots x 2 octets/mot écrits = 482 octets de sortie

- Configuration de connexion unique maximale pour les bobines :
- 3 576 bits / 8 bits/octet lus= 447 octets d’entrée
- 3 856 bits / 8 bits/octet écrits = 482 octets de sortie

Vue Channel 0 – Modbus Slave (Voie 0 – Modbus esclave)
La vue Modbus Slave (Modbus esclave) vous permet de définir le dispositif Modbus esclave.
Exemple de vue Channel 0 – Modbus Slave (Voie 0 – Modbus esclave)
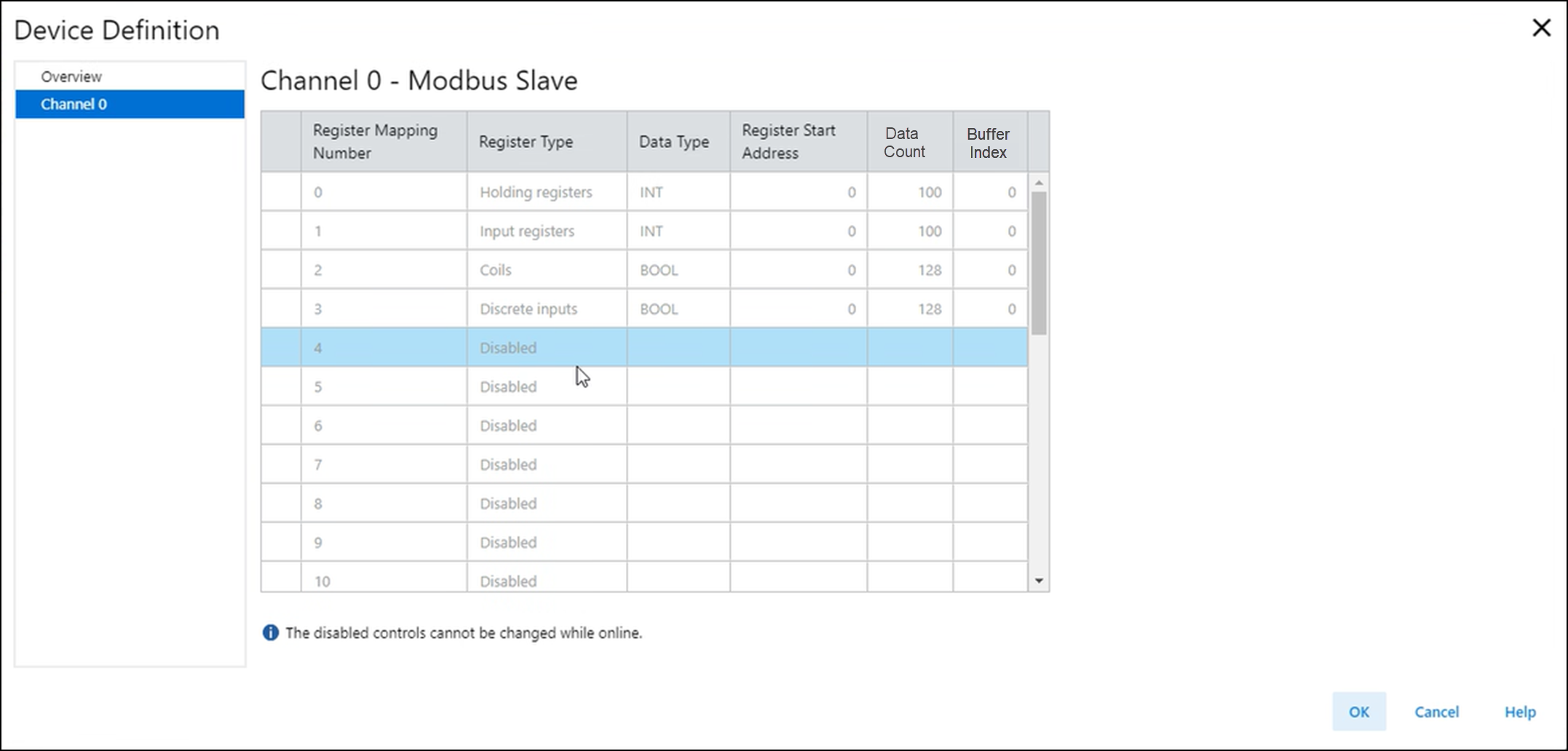
La vue Modbus Slave (Modbus esclave) comprend les paramètres suivants :
Paramètre | Définition | Choix disponibles |
|---|---|---|
Register Mapping Number (Numéro de mappage du registre) | Affiche le numéro de mappage du registre. | 0 à 29 |
Register Type (Type de registre) | Définit le type de registre.
CONSEIL:
Les paramètres ne sont pas disponibles lorsque le type de registre est désactivé.
|
|
Data Type (Type de données) | Définit le type de données pour le registre. | Les options disponibles sont basées sur le type de registre que vous choisissez. Pour les types Coils (Bobines) et Discrete Inputs (Entrées TOR), l’option disponible est :
Pour les types Holding Registers (Registres de maintien) et Input Registers (Registres d’entrée), les options disponibles sont :
|
Register Start Address (Adresse de début de registre) | Définit l’adresse de début du registre. | 0 à 65 535 |
Data Count (Nombre de données) | Définit le nombre de données du type de données. | Les valeurs valables dépendent de l’option Data Type (Type de données) :
Le nombre de registres consécutifs lus/écrits est le suivant :
Pour deux mappages quelconques avec le même type de registre, leurs plages de registre ne doivent pas se chevaucher. La plage de registres pour chaque mappage s’étend de l’adresse de début du registre à l’adresse de fin du mappage. L’adresse de fin est calculée comme suit : (adresse de début du registre + nombre de registres - 1). L’adresse de fin de chaque mappage ne doit pas dépasser l’adresse maximale de 65 535. |
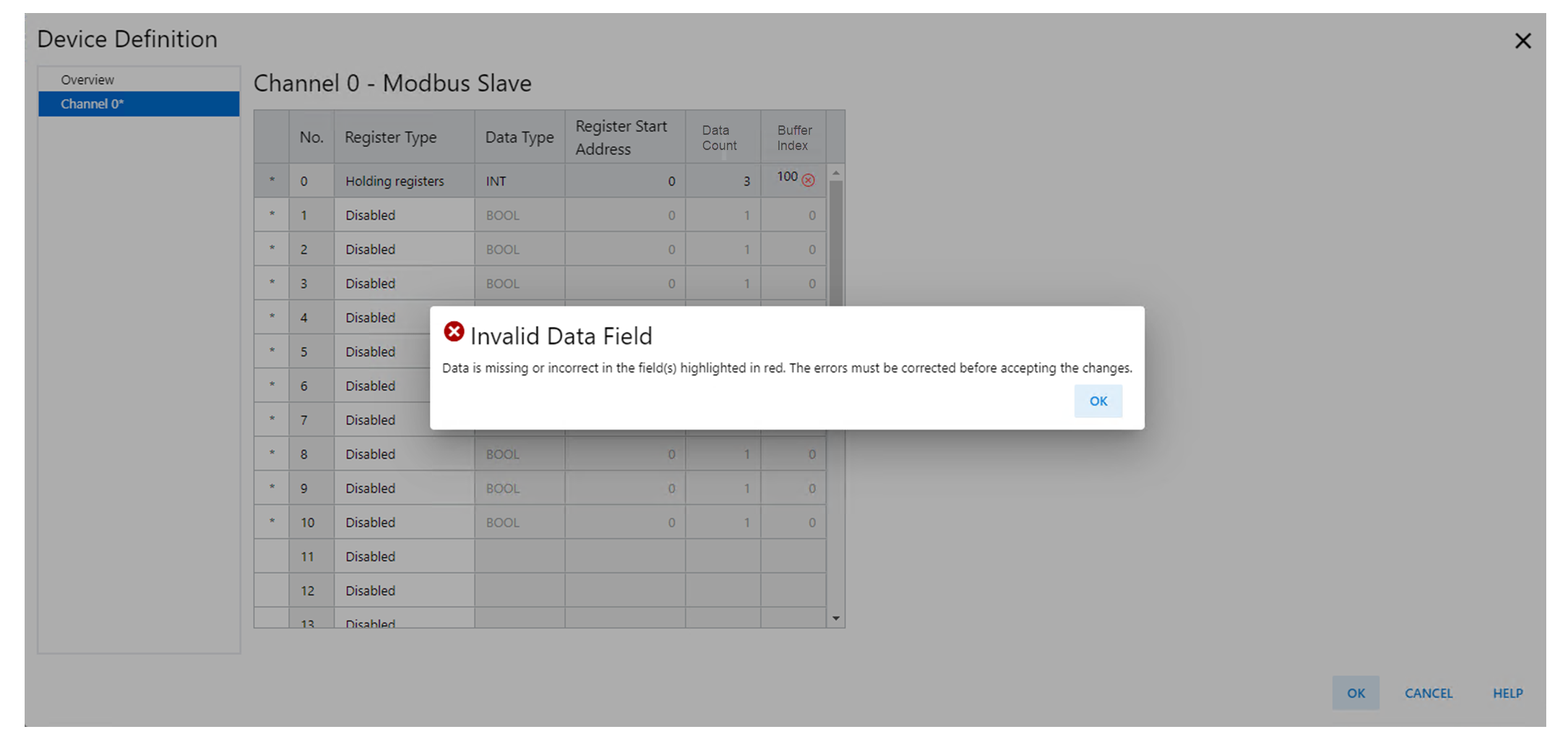
Buffer Index (Index de la mémoire tampon) | Définit l’index de mémoire tampon des mémoires tampons de registre dans les points d’entrée et/ou de sortie. Ces points sont HoldingRegister[y], Coil[z], InputRegister[y] et DiscreteInput[z], où « y » et « z » sont l’index de la mémoire tampon. |
Le nombre de mémoires tampons consécutives occupées par ce mappage de registre est le suivant :
Pour deux mappages de registre quelconques avec le même type de registre, leurs plages de mémoire tampon ne doivent pas se chevaucher. La plage de mémoire tampon s’étend de l’index de la mémoire tampon à l’index de mémoire tampon de fin causé par le nombre de données. L’index de la mémoire tampon de fin est calculé comme suit : (index de la mémoire tampon + nombre de mémoires tampons - 1). L’index de la mémoire tampon de fin de chaque mappage ne doit pas dépasser la plage valable de l’index de la mémoire tampon définie ci-dessus. |
Exemple d’erreur d’index de la mémoire tampon
Limites du tableau d’adresse Modbus esclave
Jusqu’à 30 plages de points de données peuvent être créés dans le tableau d’adresses de la station esclave du module, en fonction de la mémoire disponible :
- 200 octets de registres de maintien au maximum (jusqu’à 100 INT ou 50 REAL)
- 200 octets de registres d’entrée au maximum (jusqu’à 100 INT ou 50 REAL)
- Jusqu’à 128 bobines (index de données 0 à 15 aux limites de 8 bits)
- Jusqu’à 128 entrées discrètes (index de données 0 à 15 aux limites de 8 bits
Exemple de mappage de données Modbus esclave
Exemple de mappage de données Modbus esclave
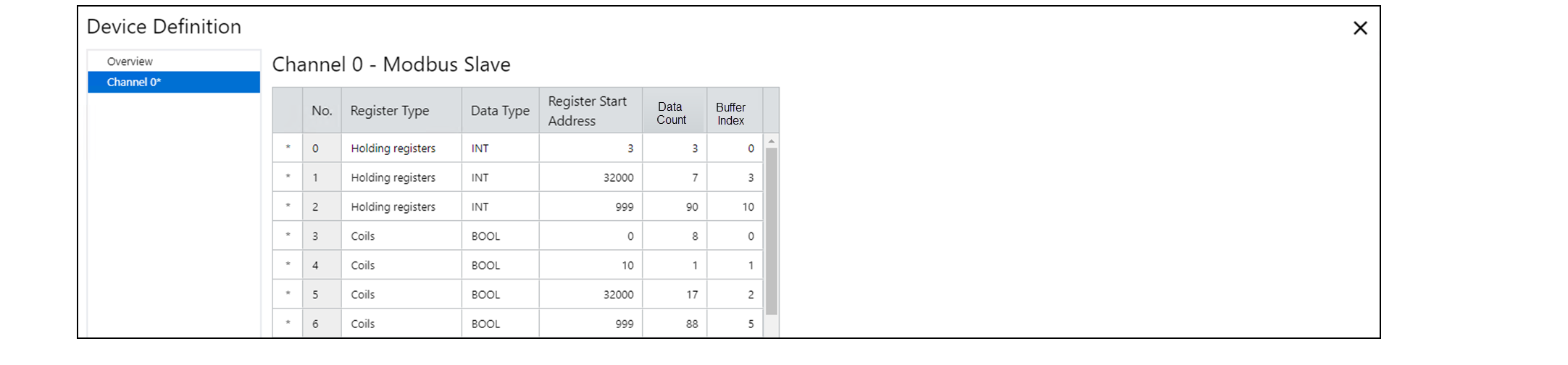
Les données représentées dans l'Figure 5 peuvent être
interprétées à partir des points du module comme suit :
- v:2:O1.Slave.HoldingRegister[0…2] = 400003…400005
- v:2:O1.Slave.HoldingRegister[3…9] = 432000…432006
- v:2:O1.Slave.HoldingRegister[10…99] = 400999…410088
- v:2:O1.Slave.Coil[0].0…0.7 = 000000…000007
- v:2:O1.Slave.Coil[1].0 = 000010
- v:2:O1.Slave.Coil[2].0…[4].0 = 0320000…032016
- v:2:O1.Slave.Coil[5].0…[15].7 = 000999…001086

Fournir une réponse