Gerätedefinition
Um die Definition eines Geräts zu ändern, wählen Sie in der Ansicht „Overview“ (Übersicht) die Option „Device Definition“ (Gerätedefinition) aus.
Wenn Sie das Modul zum ersten Mal im Projekt hinzufügen, wird im Dialogfeld „Device Definition“ (Gerätedefinition) nur die Ansicht „Overview“ (Übersicht) angezeigt. Kanal 0 ist standardmäßig deaktiviert. Je nachdem, welche Parameter Sie für Kanal 0 wählen, stehen Ihnen zusätzliche Parameter zur Verfügung.
Wenn Sie Kanal 0 auf „Modbus Master“ setzen, wird die Ansicht „Channel 0 – Modbus Master“ (Kanal 0 – Modbus Master) angezeigt. Weitere Informationen finden Sie unter Modbus Master-Ansicht „Channel 0“ (Kanal 0).
Wenn Sie Kanal 0 in der Übersichtsansicht auf „Modbus Slave“ setzen, wird die Ansicht „Channel 0 – Modbus Slave“ (Kanal 0 – Ansicht „Modbus Slave“) angezeigt. Weitere Informationen finden Sie unter Ansicht „Channel 0 – Modbus Slave“ (Kanal 0 – Modbus Slave).
Ansicht „Overview“ (Übersicht)
In der Übersichtsansicht des Dialogfelds „Device Definition“ (Gerätedefinition) können Sie ein Gerät definieren oder die Gerätedefinition ändern.
Dialogfeld „Device Definition“ (Gerätedefinition) – Übersichtsansicht
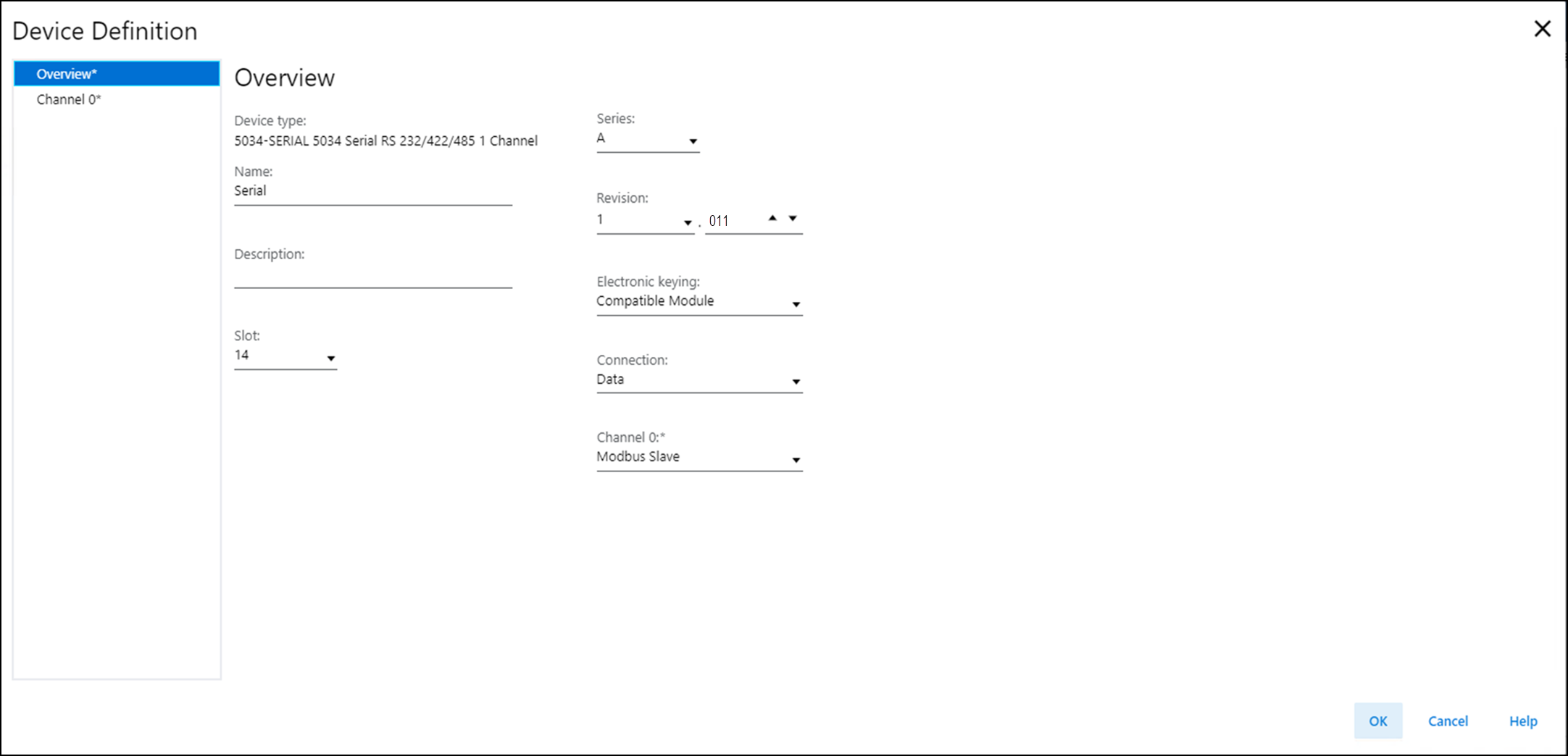
Die Ansicht „Overview“ (Übersicht) umfasst die folgenden Parameter:
Parameter | Definition | Verfügbare Optionen |
|---|---|---|
Device Type (Gerätetyp) | Zeigt die Bestellnummer und den Typ des Geräts an. | Gerätespezifisch |
Name | Geben Sie einen IEC 61131-konformen Gerätenamen ein. Wenn ein ungültiges Zeichen in dieses Feld eingegeben wird oder der Name 40 Zeichen überschreitet, ignoriert die Software das Zeichen. | Alle gültigen Werte |
Description (Beschreibung) | Geben Sie die Beschreibung für das Gerät ein. | Alle gültigen Werte |
Slot (Steckplatz) | Geben Sie die Steckplatznummer für das Gerät an. Je nach Plattform sind nur Steckplätze zwischen 1 und der maximalen Anzahl von E/A-Geräten gültig. Beim Erstellen des Geräts wird die Steckplatznummer standardmäßig auf die erste verfügbare Steckplatzposition gesetzt. Wenn die Steuerung in eine Steuerung geändert wird, die eine kleinere maximale E/A-Anzahl unterstützt, ist der aktuelle Steckplatzwert möglicherweise nicht mehr gültig. | 1 bis 32 |
Series (Serie) | Gibt die Serie des Geräts an. | Gerätespezifisch |
Revision (Version) | Gibt die Haupt- und Nebenversionen des Geräts an. Der gültige Bereich für die Nebenversion liegt zwischen 1 und 255. | Gerätespezifisch |
Electronic Keying (Elektronische Codierung) | Definiert die für das Gerät verwendete elektronische Codierung. Im Rahmen der elektronischen Codierung wird das im Projekt definierte Gerät mit dem installierten Gerät verglichen. Wenn die Codierung nicht übereinstimmt, tritt ein Fehler auf. Ausführliche Informationen zur elektronischen Codierung finden Sie in Publikation LOGIX-AT001, „Electronic Keying in Logix 5000 Control Systems Application Technique“ (Elektronische Codierung in Logix 5000-Steuerungssystemen – Anwendungstechniken). |
AUFMERKSAMKEIT:
Gehen Sie äußerst vorsichtig vor, wenn Sie „Disable Keying“ (Codierung deaktivieren) verwenden. Wenn Sie die Option falsch einsetzen, besteht Verletzungs- oder Lebensgefahr oder es kann zu Sachschäden oder wirtschaftlichen Verlusten kommen. Es wird dringend empfohlen, die Option „Disable Keying“ (Codierung deaktivieren) nicht zu verwenden. Wenn Sie „Disable Keying“ (Codierung deaktivieren) verwenden, müssen Sie in voller Eigenverantwortung sicherstellen, dass das verwendete Modul die funktionalen Anforderungen der Anwendung erfüllt. |
Connection (Verbindung) | Geben Sie die Art der Daten an, die zwischen dem Gerät und der Steuerung übertragen werden. | Data (Daten) – Standard |
Channel 0 (Kanal 0) | Gibt das Protokoll an, das vom Kanal zum Übertragen von Daten zu einem seriellen Gerät und zum Empfangen von Daten von einem seriellen Gerät verwendet wird. |
Weitere Informationen finden Sie unter Tabelle 2. |
Kommunikationsmodus | Definition |
|---|---|
Disabled (Deaktiviert) | Der Kanal wird nicht verwendet und es besteht keine physische Verbindung zwischen Steuerung und seriellem Modul. |
Generic ASCII | Ein allgemeiner Modus der seriellen Kommunikation, in dem die gesendeten oder empfangenen Benutzerdaten definiert werden können. |
Modbus-Master | Das Gerät sendet Modbus-Abfragen oder Schreibbefehle an die verbundenen Nehmergeräte. |
Modbus-Slave | Das Gerät ist als Slave einem externen Master untergeordnet und wartet auf Befehle von diesem Master. |
Modbus Master-Ansicht „Channel 0“ (Kanal 0)
In der Modbus Master-Ansicht definieren Sie das Modbus Master-Gerät.
Beispiel für die Modbus Master-Ansicht „Channel 0“ (Kanal 0)
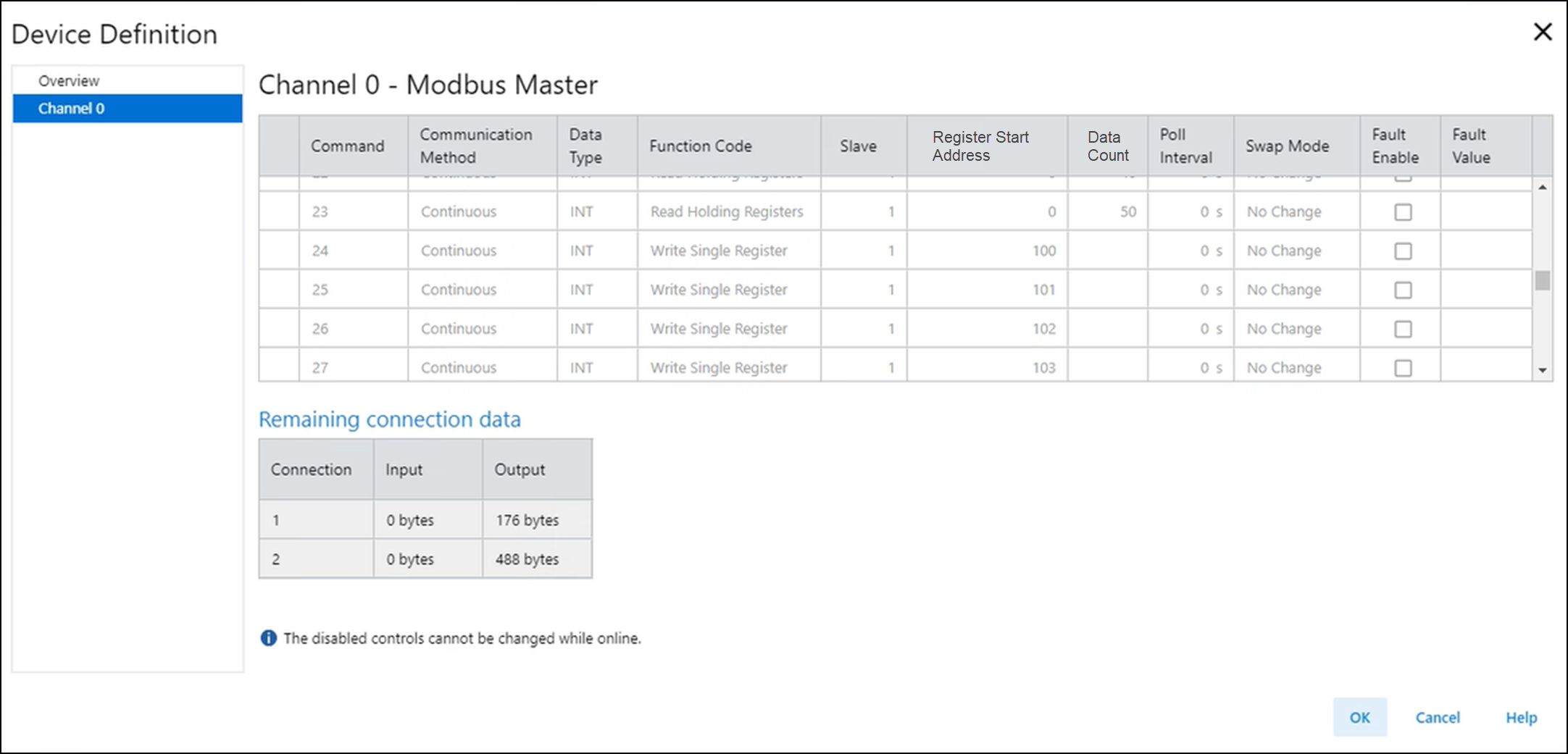
Die Modbus Master-Ansicht umfasst die folgenden Parameter:
Parameter | Definition | Verfügbare Optionen | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Command (Befehl) | Zeigt den Index des zu konfigurierenden Befehls an. | 0 bis 49 | ||||||||||||||||||
Communication Method (Kommunikationsmethode) | Gibt die Kommunikationsmethode für den Befehl an.
TIPP:
Es sind keine Parameter verfügbar, wenn die Kommunikationsmethode deaktiviert ist.
|
| ||||||||||||||||||
Data Type (Datentyp) | Gibt den Datentyp für den Befehl an. |
| ||||||||||||||||||
Function Code (Funktionscode) | Gibt die Funktion des Befehls an. Eine Beschreibung der einzelnen Funktionscode-Optionen finden Sie in Tabelle 4. | Gibt die Funktion des Befehls an. Die gültigen Werte variieren je nach Datentyp. Wenn der Datentyp „BOOL“ lautet:
Wenn der Datentyp „INT“ lautet:
Wenn der Datentyp „REAL“ lautet:
| ||||||||||||||||||
Slave | Gibt die Netzknotenadresse des Modbus-Slave-Geräts an. | Gültige Adressen eines bestimmten Modbus-Slave-Geräts liegen zwischen 1 und 247. Setzen Sie den Slave für den Broadcasting-Befehl auf 0. Der Broadcasting-Befehl kann nur ein Schreibbefehl sein. | ||||||||||||||||||
Register Start Address (Startadresse des Registers) | Gibt die Startadresse der zu lesenden oder zu beschreibenden Register an. | 0 bis 65 535 | ||||||||||||||||||
Data Count (Datenmenge) | Gibt die Anzahl der Daten des zu lesenden oder zu beschreibenden Datentyps an. Bei Verwendung von REAL werden für alle Daten 2 Register verwendet. Die Anzahl der aufeinanderfolgenden gelesenen/beschriebenen Register lautet wie folgt:
Die durch die Datenanzahl bedingte Endadresse darf die maximale Adresse von 65 535 nicht überschreiten. Die Endadresse wird berechnet als (Registerstartadresse + Anzahl der Register – 1). | Die gültigen Werte für die Datenlänge hängen vom Datentyp und vom Funktionscode ab.
| ||||||||||||||||||
Poll Interval (Poll-Intervall) | Gibt die Anzahl der Sekunden zwischen jedem Ausführen des
Befehls im kontinuierlichen Modus (Continuous) an. Wenn beispielsweise das Abfrageintervall auf 10 gesetzt ist, wartet der Modbus-Master 10 Sekunden, bevor der Befehl erneut ausgeführt wird. Ist das Abfrageintervall auf 0 gesetzt, wiederholt der Modbus-Master die Übertragung des Befehls so schnell wie möglich.
TIPP:
Dieser Parameter ist nicht verfügbar, wenn die Kommunikationsmethode auf „Conditional“ (Bedingt) gesetzt ist.
| 0 bis 32 767 | ||||||||||||||||||
Swap Mode (Swap-Modus) | Gibt die Anordnung aller 4 Bytes an Daten an, die vom Modbus-Slave empfangen oder an diesen übertragen wurden. |
TIPP:
A, B, C und D stellen vier benachbarte Bytes in den empfangenen/übertragenen Daten dar.
| ||||||||||||||||||
Fault Enable (Fehler aktivieren) | Bestimmt, ob die empfangenen Daten mit einem Fehlerwert überschrieben werden, wenn der Lesebefehl fehlschlägt. Aktivieren Sie das Kontrollkästchen, um die empfangenen Daten mit dem Fehlerwert zu überschreiben.
TIPP:
Dieser Parameter ist nicht verfügbar, wenn es sich beim Funktionscode um einen Schreibbefehl handelt.
| – | ||||||||||||||||||
Fault Value (Fehlerwert) | Gibt den Wert an, der die empfangenen Daten ersetzt, wenn der Lesebefehl fehlschlägt. | – | ||||||||||||||||||
Connection 1/Connection 2 (Verbindung 1/Verbindung 2) | Die Befehlskommunikation verwendet standardmäßig Verbindung 1. Wenn eine Befehlsdatengröße die verbleibende Datenmenge überschreitet, die für Verbindung 1 verfügbar ist, verwendet der Befehl stattdessen Verbindung 2. | – | ||||||||||||||||||
Input (Eingang) | Zeigt die verbleibende Menge an Lesedaten für diese Verbindung an. | – | ||||||||||||||||||
Output (Ausgang) | Zeigt die verbleibende Menge an Schreibdaten für diese Verbindung an. | – |
Datentyp | Funktionscode | Beschreibung |
|---|---|---|
BOOL | Read Coil Status (Diskrete Ausgänge lesen) – Funktionscode
01 | Liest den fortlaufenden Status von 1 bis 2000 diskreten Ausgängen auf einem Nehmergerät. |
Read Discrete Inputs (Diskrete Eingänge lesen) –
Funktionscode 02 | Liest den fortlaufenden Status von 1 bis 2000 diskreten Eingängen auf einem Nehmergerät. | |
Write Single Coil (Einzelnen diskreten Ausgang beschreiben) –
Funktionscode 05 | Schreibt eine einzige Ausgabe an den EIN- oder AUS-Zustand eines Nehmergeräts. | |
Force Multiple Coils (Mehrere diskrete Ausgänge zwingen) –
Funktionscode 15 | Schreibt 1 bis 1968 fortlaufende Ausgaben an den EIN- oder AUS-Zustand eines Nehmergeräts. | |
INT | Read Holding Registers (Lesen der Halteregister) –
Funktionscode 03 | Liest 1 bis 125 fortlaufende Blöcke von INT-Holding-Registern auf einem Nehmergerät. |
Read Input Registers (Input-Register lesen) – Funktionscode
04 | Liest 1 bis 125 fortlaufende Blöcke von INT-Input-Registern auf einem Nehmergerät. | |
Write Single Register (Einzelnes Register beschreiben) –
Funktionscode 06 | Schreibt ein einzelnes Holding-Register auf einem Nehmergerät. | |
Write Multiple Registers (Mehrere Register beschreiben) –
Funktionscode 16 | Schreibt 1 bis 123 fortlaufende Blöcke von INT-Holding-Registern auf einem Nehmergerät. | |
REAL | Read Holding Registers (Lesen der Halteregister) –
Funktionscode 03 | Liest 1 bis 62 fortlaufende Blöcke von REAL-Holding-Registern auf einem Nehmergerät. |
Read Input Registers (Input-Register lesen) – Funktionscode
04 | Liest 1 bis 62 fortlaufende Blöcke von REAL-Input-Registern auf einem Nehmergerät. | |
Write Multiple Registers (Mehrere Register beschreiben) –
Funktionscode 16 | Schreibt 1 bis 61 fortlaufende Blöcke von REAL-Holding-Registern auf einem Nehmergerät. |
Einschränkungen der Master-Befehlsliste
Einschränkungen der Master-Befehlsliste:
- Es können höchstens 50 Befehle erstellt werden. Die Befehle sind von der verfügbaren Speicheranbindung abhängig.
- Jeder Modbus-Master unterstützt bis zu zwei Datenverbindungen.
- Verbindung 1 unterstützt maximal 464 Bytes an gelesenen Daten und 476 Bytes an geschriebenen Daten.
- Verbindung 2 unterstützt maximal 472 Bytes an gelesenen Daten und 488 Bytes an geschriebenen Daten.
- Ressourcen für jeden Befehl:
- 2 Bytes an Eingangsdaten pro gelesenem Holding-Register oder Input-Register.
- 1 Byte an Eingangsdaten für je 1 bis 8 gelesene diskrete Ausgänge oder diskrete Eingänge.
- 2 Bytes an Ausgangsdaten pro geschriebenem Holding-Register.
- 1 Byte an Ausgangsdaten für je 1 bis 8 beschriebene diskrete Ausgänge.
- Bei unzureichender Speicheranbindung wird eine Fehlermeldung ausgegeben.
Speicherbelegung durch Master-Befehle
Im Folgenden finden Sie ein Beispiel für die Speicherbelegung durch Master-Befehle.
- Maximale Konfiguration für eine einzelne Verbindung für Register:
- 223 Wörter x 2 Bytes pro gelesenem Wort = 446 Eingangsbytes
- 241 Wörter x 2 Bytes pro geschriebenem Wort = 482 Ausgangsbytes

- Maximale Konfiguration für eine einzelne Verbindung für diskrete Ausgänge:
- 3576 Bits / 8 Bits pro gelesenem Byte = 447 Eingangsbytes
- 3856 Bits / 8 Bit/Byte geschrieben = 482 Ausgangsbyte

Ansicht „Channel 0 – Modbus Slave“ (Kanal 0 – Modbus Slave)
In der Modbus Slave-Ansicht definieren Sie das Modbus-Slave-Gerät.
Beispiel für die Ansicht „Channel 0 – Modbus Slave“ (Kanal 0 – Modbus Slave)
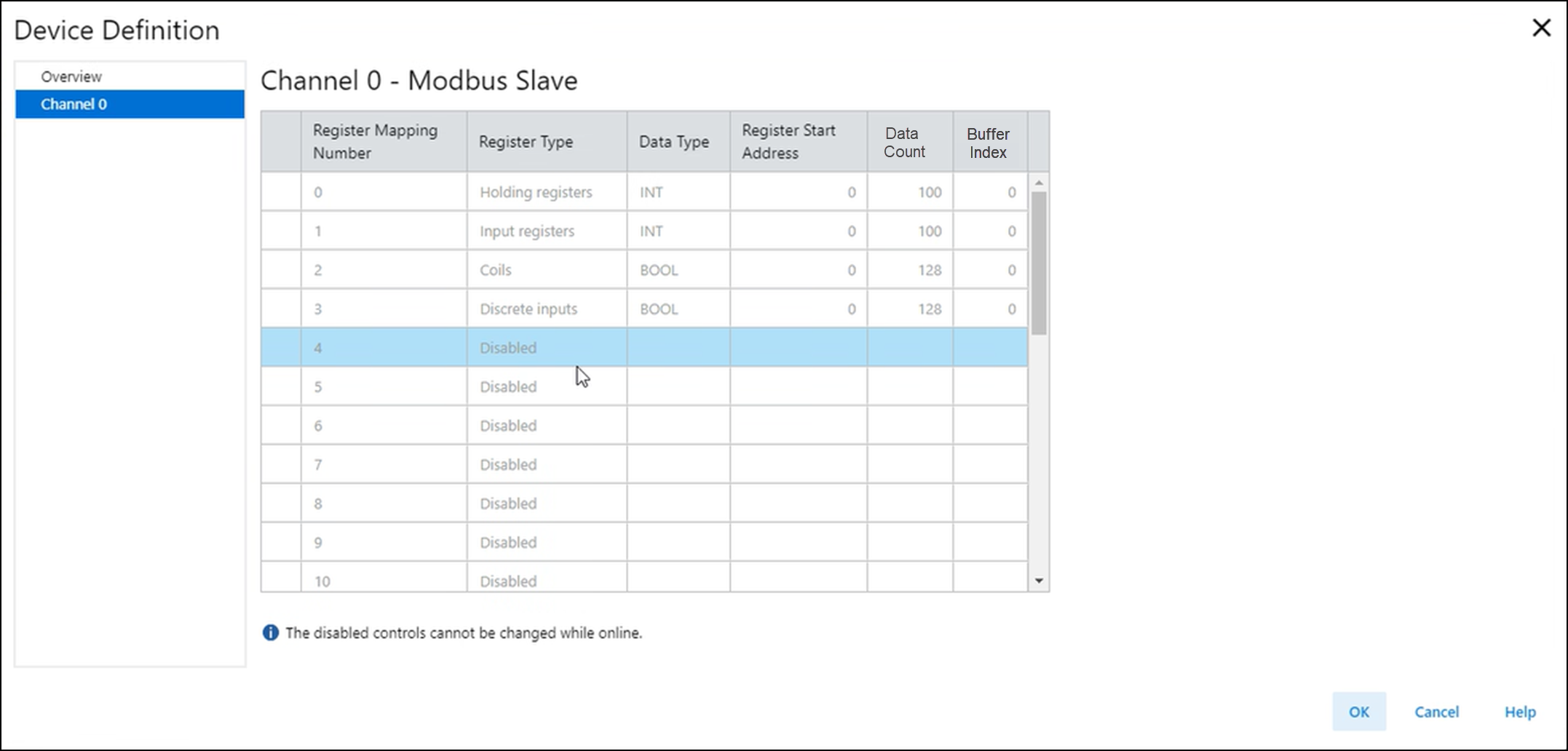
Die Modbus Slave-Ansicht umfasst die folgenden Parameter:
Parameter | Definition | Verfügbare Optionen |
|---|---|---|
Register Mapping Number (Nummer für Registerzuordnung) | Zeigt die Registerzuordnungsnummer an. | 0 bis 29 |
Register Type (Registertyp) | Gibt den Registertyp an.
TIPP:
Es sind keine Parameter verfügbar, wenn der Registertyp deaktiviert ist.
|
|
Data Type (Datentyp) | Gibt den Datentyp (Data Type) für das Register an. | Die verfügbaren Optionen basieren auf dem von Ihnen gewählten Registertyp. Für diskrete Ausgänge und diskrete Eingänge steht die folgende Option zur Verfügung:
Verfügbare Optionen für Holding- und Input-Register:
|
Register Start Address (Startadresse des Registers) | Gibt die Startadresse des Registers an. | 0 bis 65 535 |
Data Count (Datenmenge) | Gibt die Anzahl der Daten des Datentyps an. | Die gültigen Werte variieren je nach Datentyp:
Die Anzahl der aufeinanderfolgenden gelesenen/beschriebenen Register lautet wie folgt:
Bei Zuordnungen mit demselben Registertyp dürfen sich die Registerbereiche nicht überlappen. Der Registerbereich für jede Zuordnung reicht von der Startadresse des Registers bis zur Endadresse der Zuordnung. Die Endadresse wird berechnet als (Registerstartadresse + Anzahl der Register – 1). Die Endadresse der einzelnen Zuordnungen darf die maximale Adresse von 65 535 nicht überschreiten. |
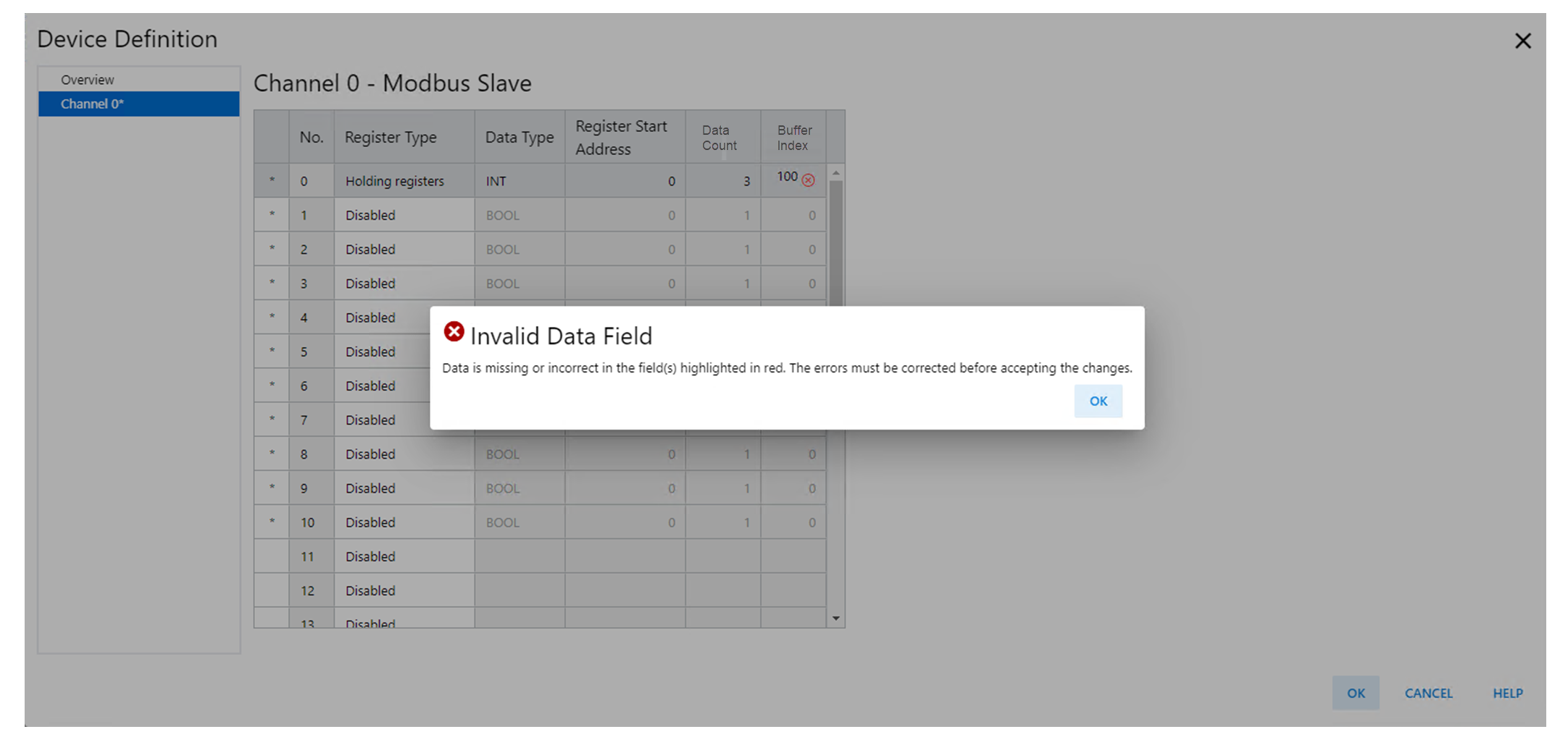
„Buffer Index“ (Pufferindex) | Gibt den Pufferindex der Registerpuffer in Eingangs- und/oder Ausgangs-Tags an. Diese Tags sind HoldingRegister[y], Coil[z], InputRegister[y] und DiscreteInput[z], wobei „y“ und „z“ der Pufferindex sind. |
Anzahl aufeinanderfolgender Puffer, die von dieser Registerzuordnung belegt werden:
Bei Registerzuordnungen mit demselben Registertyp dürfen sich die Pufferbereiche nicht überlappen. Der Pufferbereich reicht vom Pufferindex bis zum Endpufferindex, der sich durch die Datenanzahl ergibt. Der Index des Endpuffers wird berechnet als (Pufferindex + Anzahl der Puffer – 1). Der Endpufferindex der einzelnen Zuordnungen darf den oben definierten gültigen Bereich des Pufferindex nicht überschreiten. |
Beispiel für einen Pufferindexfehler
Modbus-Slave – Einschränkungen der Adresstabelle
Je nach verfügbarem Speicher können bis zu 30 Datenpunktbereiche in der Modul-Nehmergerät-Adresstabelle erstellt werden:
- Maximal 200 Byte an Holding-Registern (bis zu 100 INTs oder 50 REALs)
- Maximal 200 Byte an Input-Registern (bis zu 100 INTs oder 50 REALs)
- Bis zu 128 diskrete Ausgänge (Datenindizes 0 bis 15 mit 8-Bit-Grenzen)
- Bis zu 128 diskrete Eingänge (Datenindizes 0 bis 15 mit 8-Bit-Grenzen)
Modbus Slave – Beispiel für Datenzuordnung
Modbus Slave – Beispiel für Datenzuordnung
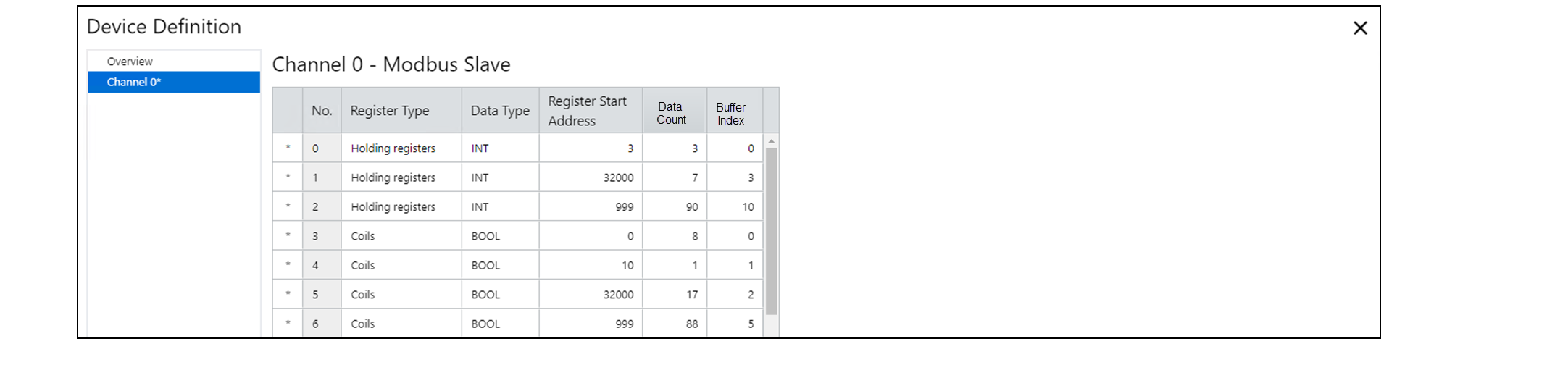
Die in Abbildung 5 dargestellten Daten können wie folgt anhand der Modul-Tags interpretiert werden:
- v:2:O1.Slave.HoldingRegister[0 bis 2] = 400003 bis 400005
- v:2:O1.Slave.HoldingRegister[3 bis 9] = 432000 bis 432006
- v:2:O1.Slave.HoldingRegister[10 bis 99] = 400999 bis 410088
- v:2:O1.Slave.Coil[0].0 bis 0.7 = 000000 bis 000007
- v:2:O1.Slave.Coil[1].0 = 000010
- v:2:O1.Slave.Coil[2].0 bis [4].0 = 0320000 bis 032016
- v:2:O1.Slave.Coil[5].0 bis [15].7 = 000999 bis 001086

Rückmeldung geben